

Soft robotika alebo inak povedané mäkká robotika je v súčasnosti jedným z najsledovanejších odvetví. Roboty, pri stavbe ktorých sa namiesto tradičných tvrdých a pevných materiálov používajú mäkké a ohybné, môžu bezpečnejšie spolupracovať s ľuďmi a uplatniť sa pri manipulácii s jemnými predmetmi.
Mäkké roboty však boli dosiaľ obmedzené nedostatkom dobrého zmyslového vnímania. Dobrá robotická ruka potrebuje cítiť, čoho sa dotýka (hmatové vnímanie), a potrebuje pritom vnímať polohu a pozície svojich prstov. Takéto zmysly doteraz väčšine mäkkých robotov chýbali.
Robotická mäsožravka

Výskumníci z Laboratória počítačovej vedy a umelej inteligencie (Computer Science and Artificial Intelligence Laboratory – CSAIL) pri MIT v dvoch nedávno uverejnených štúdiách predstavili nové nástroje, ktoré umožnia mäkkým robotom lepšie vnímať a rozoznávať, s čím prichádzajú do styku: schopnosť vidieť a klasifikovať rôzne objekty a disponovať pritom jemnejším, mäkším dotykom. Radi by sme (robotom) umožnili poznávať svet hmatom. Mäkké robotické ruky majú senzorizovanú kožu (povrch), ktorá im umožní uchopovať širokú škálu objektov, od jemných ako zemiakové lupienky až po ťažké ako napríklad fľaše mlieka, uviedla v článku na stránke MIT venovanej problematike riaditeľka CSAIL Daniela Rusová. Prvá zo štúdií predstavuje výsledky minuloročného výskumu MIT a Harvardovej univerzity, v rámci ktorého vedecký tím vyvinul mäkkú a zároveň silnú robotickú ruku (chytač) vo forme kónickej origami štruktúry. Predmety uchopí tak, že spľasne a zovrie sa podobným spôsobom ako známa mäsožravá rastlina mucholapka podivná (Dionaea muscipula), pričom dokáže manipulovať objektmi, ktoré sú aj stokrát ťažšie ako ona sama. Aby sa všestrannosť a prispôsobivosť takejto mäkkej robotickej ruky ešte viac priblížila vlastnostiam ľudskej ruky, vedecký tím prišiel s pozoruhodným prídavkom: sú ním hmatové senzory vyrobené z latexových mechúrikov (balónov) pripojených k snímačom tlaku. Nové senzory umožnia robotickej ruke nielen uchopovať predmety, ktoré sú jemné ako zemiakový lupienok, ale ich aj klasifikovať a umožniť tak robotu lepšie pochopiť, čo zdvíha a prispôsobiť tomu silu, respektíve jemnosť dotyku. Pri testoch klasifikovania objektov senzory správne identifikovali objekty s viac ako 90-percentnou úspešnosťou, dokonca aj v prípadoch, keď skúmaný predmet počas testu vykĺzol zo zovretia. Na rozdiel od mnohých iných mäkkých hmatových senzorov tie naše môžu byť rýchlo vyrobené, dodatočne namontované a prispôsobené konkrétnej robotickej ruke a vykazovať pritom stále citlivosť a spoľahlivosť, tvrdí Josie Hughesová z MIT, ktorá bola hlavnou autorkou štúdie o nových senzoroch. Dúfame, že tieto senzory poskytnú (robotickým rukám) nové možnosti jemného cítenia, ktoré sa potom môže uplatniť v širokej škále činností vo výrobe, napríklad pri balení a zdvíhaní.
Vnímavé prsty
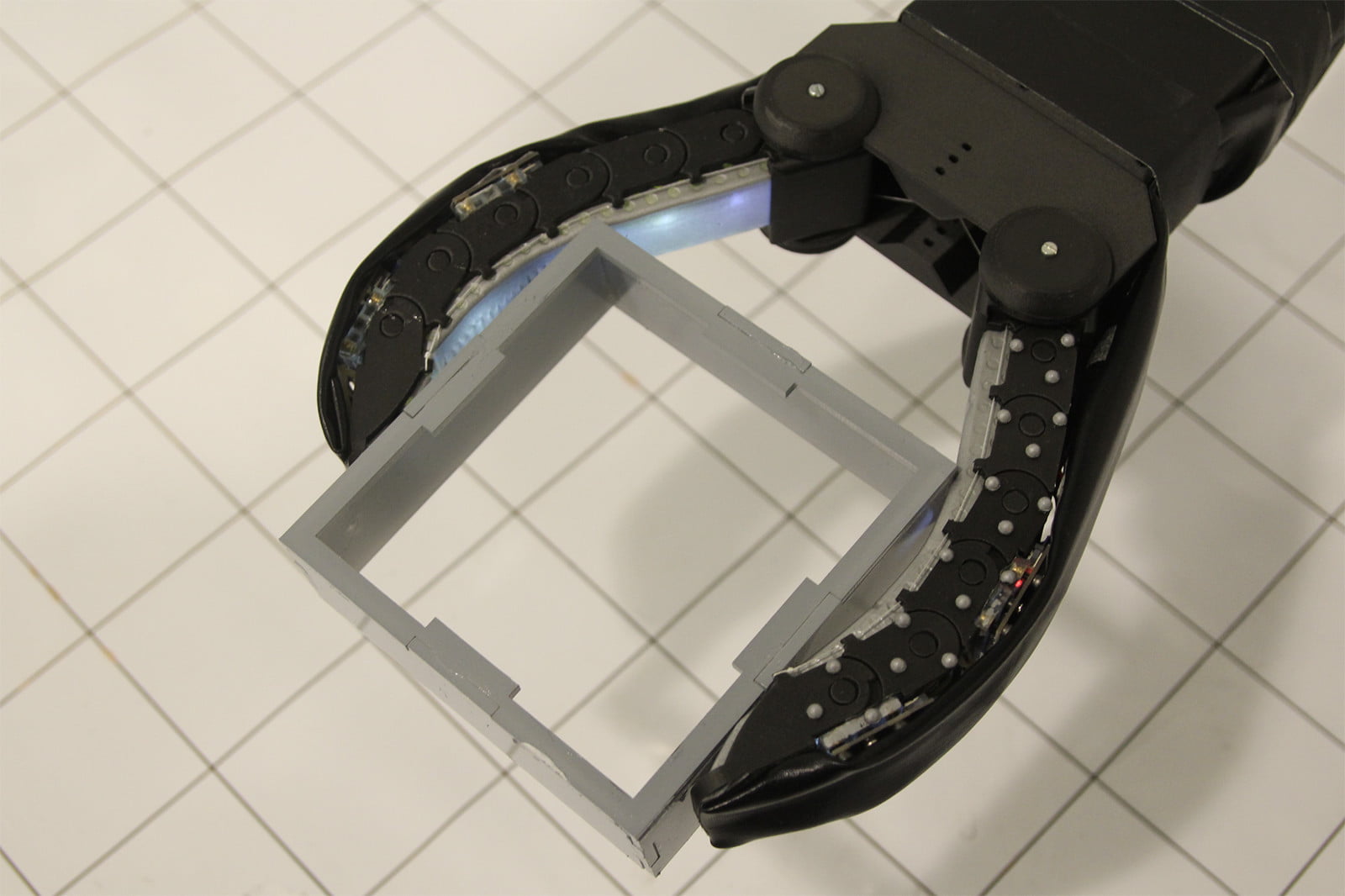
Autori druhej štúdie sa venovali vytvoreniu mäkkého robotického prsta nazvaného GelFlex, ktorý používa vstavané kamery a procesy tzv. hlbokého učenia sa na to, aby mu umožnili hmatové cítenie s vysokým rozlíšením a propriocepciu, teda povedomie o pozíciách a pohyboch vlastného tela. Ruka, ktorá navonok celkom pripomína obyčajný dvojprstý držiak plastových pohárikov, aké možno vidieť v automatoch na kávu či sódu, používa mechanizmus na ovládanie prstov ovládaný umelými šľachami. Pri testovaní na kovových objektoch rôznych tvarov systém predviedol podľa spomínaného článku MIT viac ako 96-percentnú úspešnosť. Náš mäkký prst dokáže disponovať vysokou presnosťou pri propriocepcii, správne odhadovať a predvídať uchopené predmety a zároveň odolávať aj pozoruhodne silným nárazom bez poškodenia prostredia alebo seba samého, uvádza Yu She, hlavný autor štúdie o prste GelFlex. Obalením mäkkých prstov do ohybného exoskeletu a umožnením sledovania prostredia pomocou vstavaných kamier s vysokým rozlíšením sme významne rozšírili pole možností pre mäkké manipulátory.
R, spracované podľa MIT News
Foto MIT CSAIL


