

 Odborníci odhadujú, že každoročne sa v Európe vykoná okolo 500 000 menších stavebných prác, ktorých súčasťou sú výkopové práce potrebné na uloženie sieťových rozvodov.
Odborníci odhadujú, že každoročne sa v Európe vykoná okolo 500 000 menších stavebných prác, ktorých súčasťou sú výkopové práce potrebné na uloženie sieťových rozvodov.
Výkopy v intraviláne treba vykonávať veľmi opatrne, pretože výkresy so zakreslenými už existujúcimi sieťami v mieste výkopu sa pomerne často nestotožňujú so skutočnosťou. Preto sa možnosť vytvárania podzemných priechodov na kladenie rúr či káblov metódou pretláčania využíva obvykle len v extraviláne, kde sa nepredpokladá prítomnosť podpovrchových sieťových rozvodov.
Vytváranie podzemných tunelov malého priemeru aj v urbánnom priestore, ktorého podzemie je preplnené rôznymi sieťami, by mal v budúcnosti umožniť inteligentný robotický systém s príhodným názvom BADGER (jazvec). Pod týmto akronymom sa skrýva projekt s pomerne dlhým názvom roBot for Autonomous unDerGround trenchless opERations, mapping and navigation, čiže niečo ako robot na autonómne podzemné bezvýkopové operácie, mapovanie a navigáciu. Ide o medzinárodný projekt podporovaný Európskou úniou a koordinovaný španielskou univerzitou UC3M (Universidad Carlos III de Madrid).
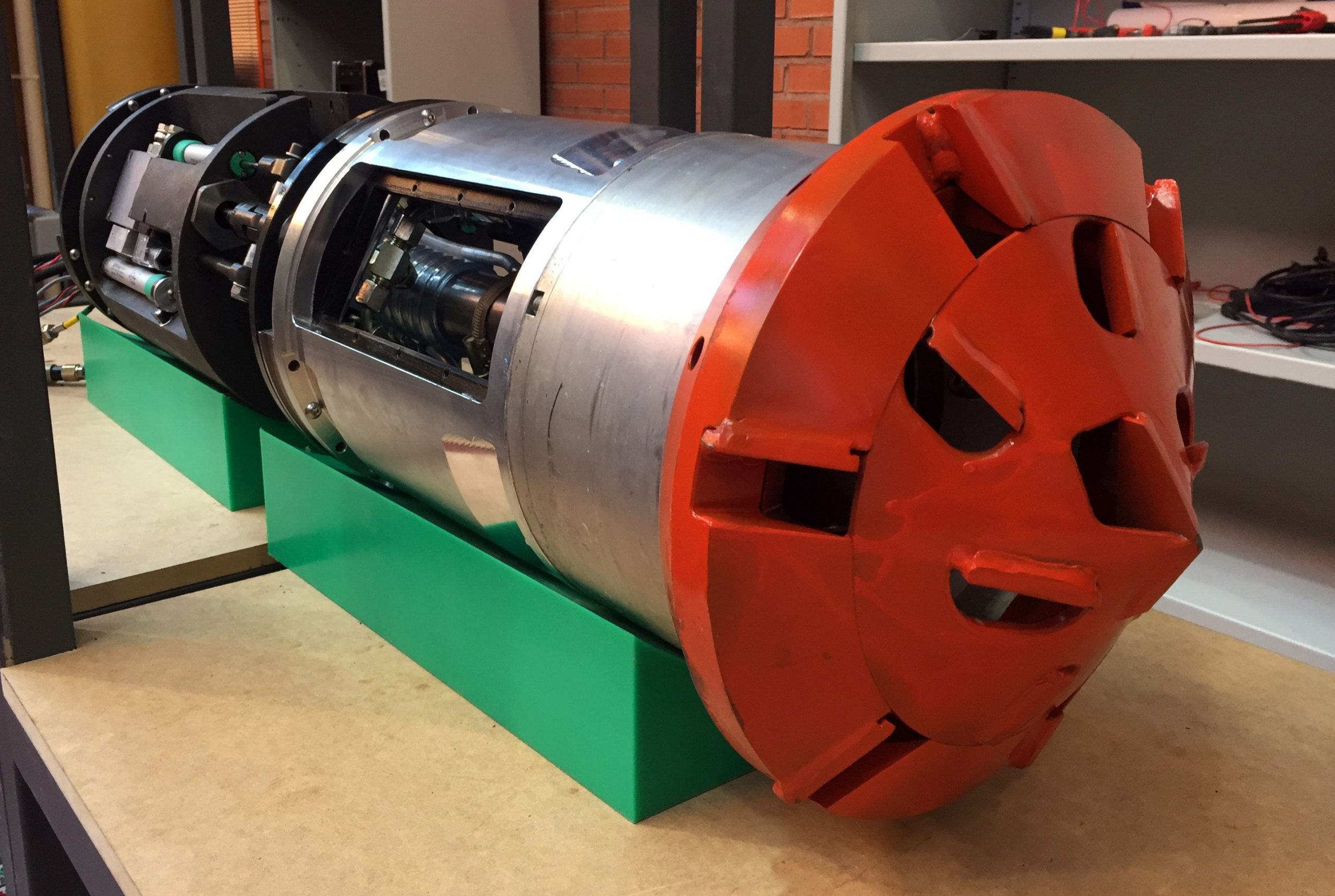
V rámci tohto projektu vyvinuli inteligentný podzemný robotický systém pozostávajúci z dvoch hlavných prvkov. Prvým je po povrchu sa pohybujúce vozidlo s georadarom, ktorý skenuje terén pod vozidlom a zisťuje potenciálne prekážky (káble, potrubia a podobne). Druhým prvkom systému je autonómny podzemný robot, ktorý vykonáva vŕtanie podzemnej trasy na ukladanie nových sieťových rozvodov. Podstatná inovácia spočíva v tom, že podzemný robot sa pod povrchom pohybuje autonómne, a to podľa pokynov špeciálneho softvéru, ktorého vstupné údaje pochádzajú z georadaru. Trasa je softvérom navrhnutá tak, aby sa robot vyhol všetkým sieťam uloženým v podzemí.
Prototyp inovatívneho robota už vzbudil pozornosť mnohých súkromných firiem. Vývoj by mal pokračovať tak, aby do dvoch-troch rokov mohol už operovať v reálnom urbánnom prostredí. Možno sa ho dočkáme aj v našich mestách.
RM, foto UC3M


